
Precision Motion Architecture
Parallel Kinematics vs. Serial Kinematics
Parallel and serial kinematic systems can both provide accurate multi-axis motion, but they differ strongly in stiffness, dynamics, error behavior, travel range, and control complexity.
Difference Between Parallel and Serial Kinematics
Parallel kinematics and serial kinematics describe how multiple motion axes are mechanically arranged. In a serial system, axes are stacked one on top of another: the X stage carries the Y stage, the Y stage carries the Z stage, and so on. This architecture is simple, modular, and easy to understand. It is often a good choice for long travel, straightforward XYZ positioning, laboratory setups, and applications where cost, configurability, or independent axis selection matter most.
Parallel kinematics use several linear actuators working together on one moving platform. A hexapod is the best-known example: six actuators support and position a single platform in six degrees of freedom. Because each actuator contributes directly to platform motion, parallel systems can provide higher stiffness, lower moving mass, better dynamic behavior, and reduced accumulation of positioning errors. They also avoid many moving-cable problems and can provide a programmable center of rotation.
The tradeoff is complexity. Parallel systems are availalbe for many motion technologies, from steering mirrors to parallel kinematic air bearings. They need more advanced control, coordinate transformations, and careful calibration. They are strongest in compact multi-axis alignment, precision optics, photonics, semiconductor metrology, motion simulation, and applications requiring coordinated 6-axis motion. Serial stages remain advantageous when long travel, simple setup, lower cost, or axis-by-axis modularity are more important than maximum dynamic precision.
Parallel Kinematics Advantages
- Lower moving mass and inertia
- Higher stiffness and better dynamics
- No stacked-axis error accumulation
- Compact 6-axis motion is possible
- Programmable center of rotation
Serial Kinematics Advantages
- Simple, modular axis layout
- Longer travel is often easier
- Lower system complexity
- Axis-by-axis configuration flexibility
- Good for straightforward XYZ motion
Parallel and Serial Kinematics Examples

Parallel kinematics hexapod: multiple actuators support and move one platform.
Serial kinematics: axes are stacked and each lower axis carries the axes above it.
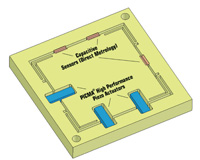
Parallel flexure-guided nanopositioning system with active trajectory control.
Stacked serial kinematics flexure system.
Nested serial kinematics flexure system.

Parallel-kinematics Hexapod 6-axis system shown in different positions.
Parallel-Kinematic Nanopositioning and Steering Mirror Examples

6-DOF parallel-kinematic nanopositioning stage.
XY parallel-klinematic nanopositioning stage with capacitive feedback.
Ultra-high-flatness XY nanopositioning stage.
Low-profile Z/tip/tilt piezo scanning stage.
Low-profile XY scanner for imaging.
Parallel-kinematic differential drive principle.
Tripod piezo drive principle.
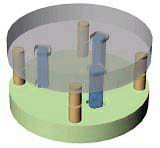
Active optics platform with three actuators and four sensors.

Parallel-kinematic ultra-fast FSM piezo tip/tilt platform.

High-speed tripod tip/tilt steering mirror.

Active tip/tilt mirror example for telescope optics.

Additional precision motion literature.